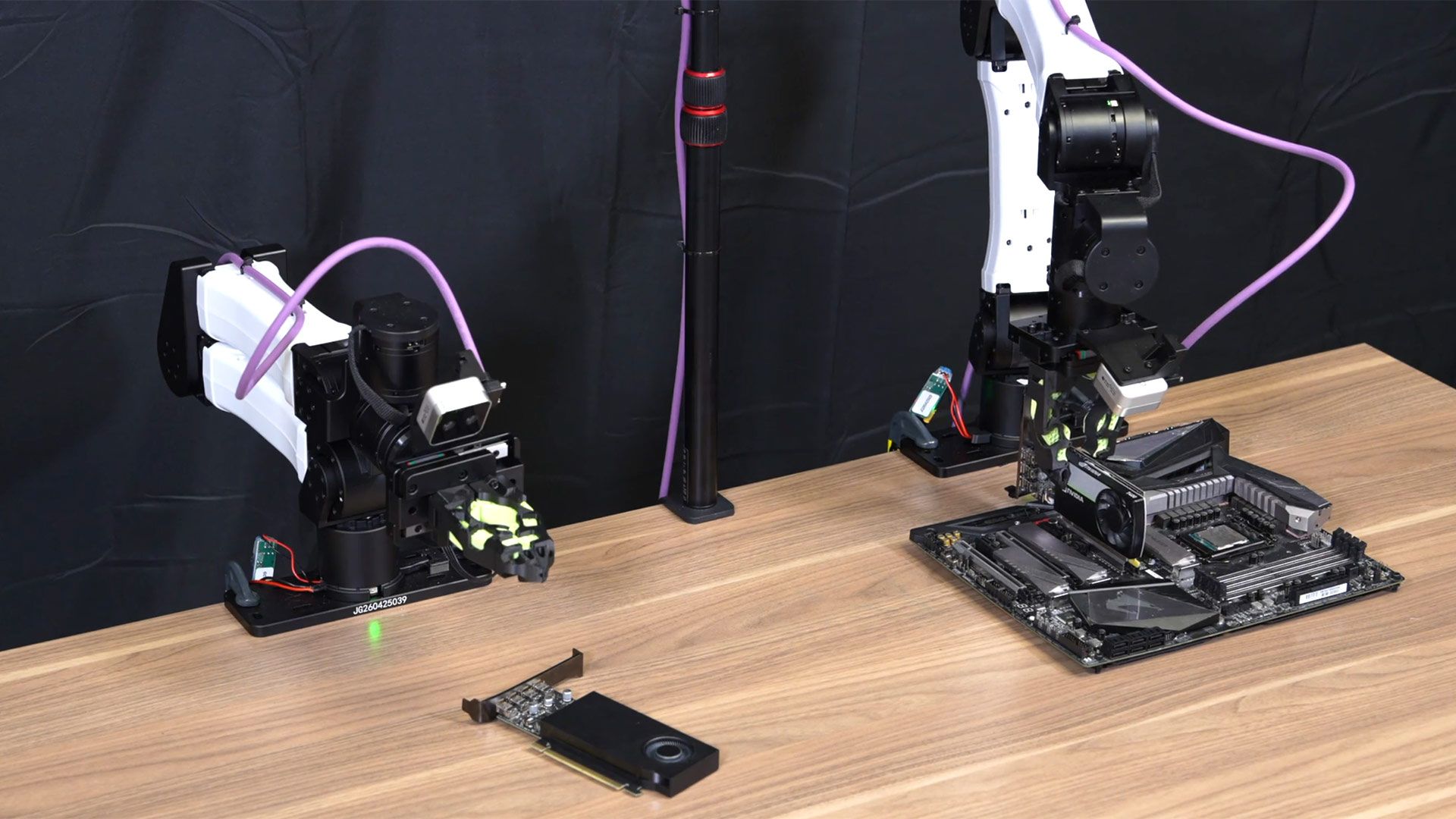
Nvidia showcases robots installing GPUs autonomously
NVIDIA GEAR Lab, in collaboration with Carnegie Mellon University and UC Berkeley, has released ENPIRE, an agentic robotics framework that lets frontier coding agents autonomously learn dexterous manipulation tasks on real robot hardware - including GPU insertion into a motherboard - with no human intervention, per the official NVIDIA research page and trade coverage. Linxi 'Jim' Fan, NVIDIA's Director of AI & Distinguished Scientist and GEAR Lab co-lead, described the system as enabling AutoResearch in the physical world for the first time. ENPIRE comprises four modules: Environment (EN), Policy Improvement (PI), Rollout (R), and Evolution (E). Coding agents - including Codex (GPT-5.5), Claude Code, and Kimi Code variants - were tested in fleet sizes of 1, 4, and 8 robots, achieving a 99% success rate on challenging tasks such as GPU insertion, pin organization, and zip-tie cutting. The NVIDIA research page indicates an open-source release is planned.
What happened
NVIDIA GEAR Lab, jointly with Carnegie Mellon University and UC Berkeley, published ENPIRE (ENvironment, Policy Improvement, Rollout, Evolution), a harness framework that enables frontier coding agents to autonomously run the full loop of real-world robot learning: reset the scene, execute a policy, verify the outcome, refine code, and repeat, per the NVIDIA research page. Demonstrations include a robot arm performing high-precision GPU insertion into a motherboard, organizing pins into a pin box, tying zip-ties, and a Push-T shape-matching task. Linxi 'Jim' Fan (NVIDIA Director of AI & Distinguished Scientist, GEAR Lab co-lead) described the system as enabling "AutoResearch in the physical world for the first time." Trade press and the project page indicate an open-source release is planned.
Technical details
ENPIRE's four modules work as a closed loop: the Environment (EN) module handles automatic scene reset and outcome verification; Policy Improvement (PI) generates and revises policy code from rewards, videos, and failure traces; Rollout (R) runs budgeted robot trials; and Evolution (E) has coding agents analyze logs, consult literature, and improve training infrastructure and algorithm code. The NVIDIA research page reports that agent teams of up to 8 robots, guided by frontier coding agents including Codex (GPT-5.5), Claude Code (Opus 4.7), and Kimi Code (Kimi K2.6), achieved a 99% pass@8 success rate on showcased dexterous manipulation tasks. Scaling from 1 to 8 agents improved research progress speed but increased total token consumption; the team introduces Mean Robot Utilization (MRU) and Mean Token Utilization (MTU) metrics to track efficiency. The project also includes simulation evaluation in the RoboCasa benchmark.
Context and significance
Open-source frameworks that combine automatic scene-reset, self-verification, and repeatable hardware rollouts materially lower the engineering overhead for robotics policy research. If the planned open-source release reproduces the reported results broadly, it could accelerate iteration on manipulation policies and physical RL reproducibility for academic and small-lab teams that previously lacked the staffing to operate continuous robot experimentation.
What to watch
Verify the released codebase and documentation for reproducible benchmarks, instrumentation for safety checks during automated trials, and constraints on the robot hardware required. Observers should examine measured task success rates under diverse initial conditions, sample-efficiency metrics, and details on how the system verifies correct assembly steps. The planned open-source release timing has not yet been publicly confirmed.
Key Points
- 1NVIDIA GEAR Lab (with CMU and UC Berkeley) released ENPIRE, a closed-loop agentic framework that lets coding agents autonomously learn dexterous robot manipulation tasks on real hardware.
- 2Teams of up to 8 robots guided by Codex, Claude Code, or Kimi Code agents achieved a 99% success rate on tasks including GPU insertion and zip-tie cutting, with no human in the loop.
- 3A planned open-source release could lower the engineering bar for reproducible physical RL research, but success rates under diverse hardware and conditions await independent verification.
Scoring Rationale
A notable research contribution from NVIDIA, CMU, and UC Berkeley: ENPIRE demonstrates that frontier coding agents can close the full physical-RL loop on real hardware, achieving 99% success rates on dexterous tasks with fleet scaling. Meaningful for robotics researchers and practitioners building physical AI systems, but the planned open-source release is not yet confirmed and independent replication results are pending.
Sources
Public references used for this report.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems

