Researchhumanoid roboticsreinforcement learningsim to real
BIGAI Develops OmniXtreme For Humanoid Motion
8.2
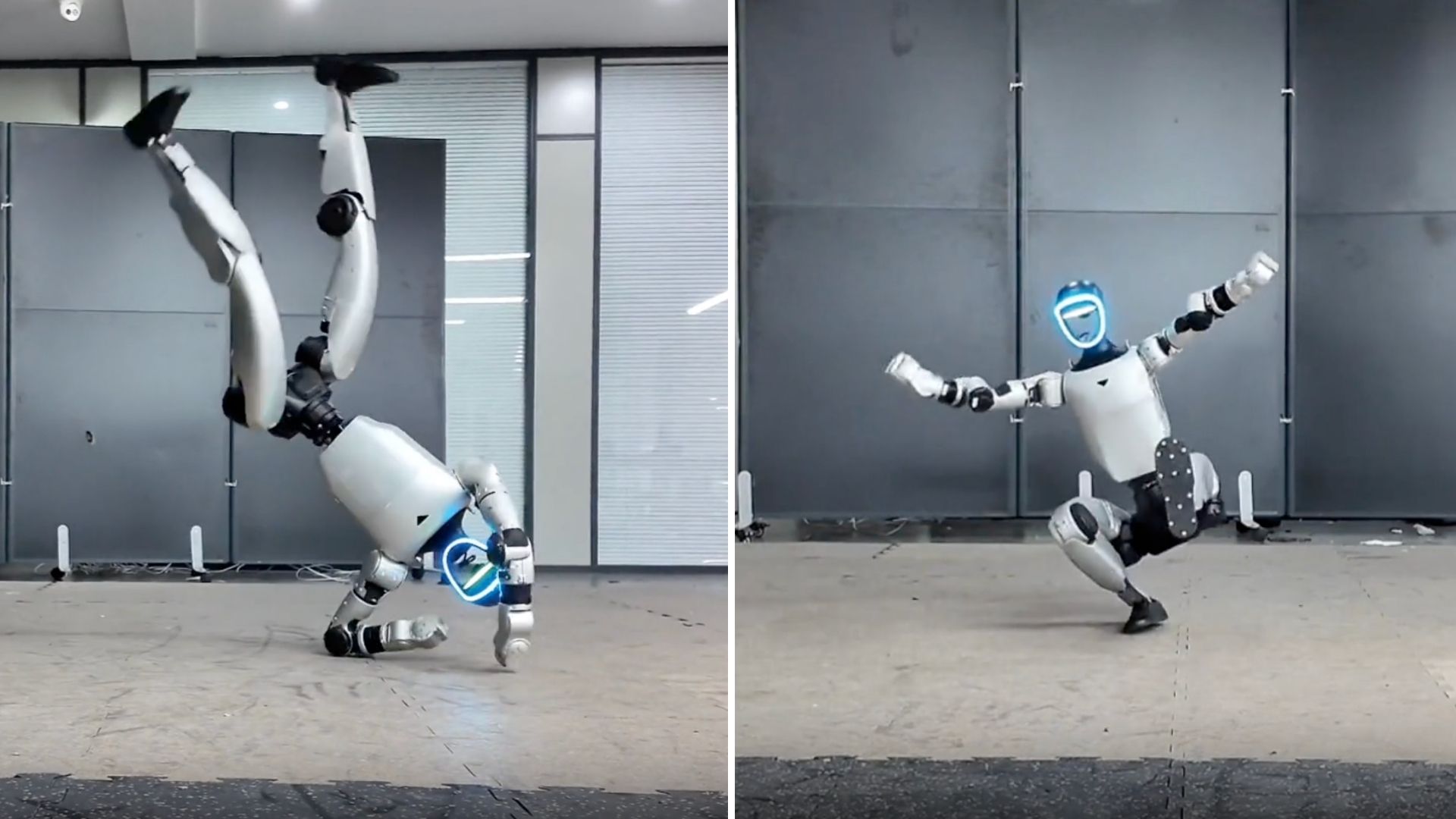
Beijing Institute for General Artificial Intelligence (BIGAI) unveils OmniXtreme, a two-stage humanoid motion framework, in a paper published on arXiv on February 27, 2026. The system uses DAgger-based flow matching and a frozen base plus residual policy to enable a Unitree G1 to perform backflips, breakdancing, and other high-dynamic moves with reported success rates above 90 percent. The approach aims to improve sim-to-real generalization for diverse extreme motions.
Key Points
- 1Demonstrates unified policy enabling diverse extreme motions with over 90% success rates.
- 2Uses two-stage training—DAgger-based flow matching and residual post-training—to generalize across varied motion priors.
- 3Enables efficient sim-to-real deployment for humanoids, lowering retraining and scaling multi-skill controllers.
Scoring Rationale
Strong technical novelty and actionable sim-to-real methods, but limited by preprint status and experiments on a single robot platform.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems
