Researchreinforcement learninglegged locomotionrobot design
TARS3D Demonstrates Dual Gait Robotic Locomotion
7.0
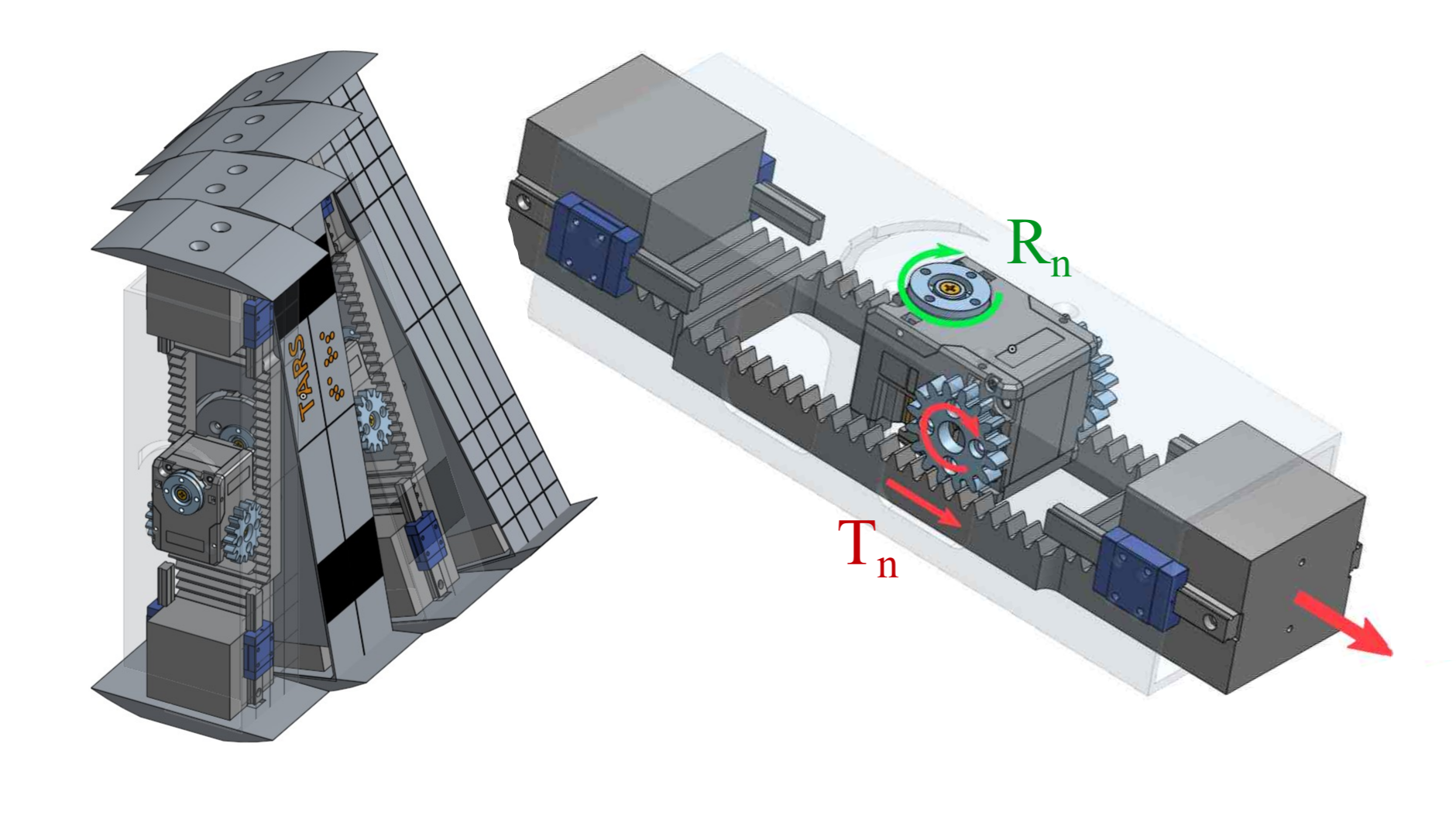
Aditya Sripada and Abhishek Warrier recently published TARS3D, a proof-of-concept robot inspired by Interstellar’s TARS that achieves both bipedal walking and high-speed rolling. The platform uses four side-by-side rotating columns with extendable limbs and curved foot plates, and the authors report reinforcement learning produced robust walking gaits while rolling remained sensitive to terrain.
Key Points
- 1Demonstrates dual gaits: robust bipedal walking and high-speed rolling using four rotating columns.
- 2Highlights reinforcement learning enabling unconventional limb designs to discover effective, non-biological locomotion strategies.
- 3Suggests practitioners can apply RL to novel mechanical designs for resilient, efficient robot gaits.
Scoring Rationale
Demonstrates RL-driven, novel locomotion with tangible results, but remains a proof-of-concept with terrain sensitivity and niche applicability.
Sources
Public references used for this report.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems