ROBOTIS Teaches Humanoid Robot K-POP Dance from Video
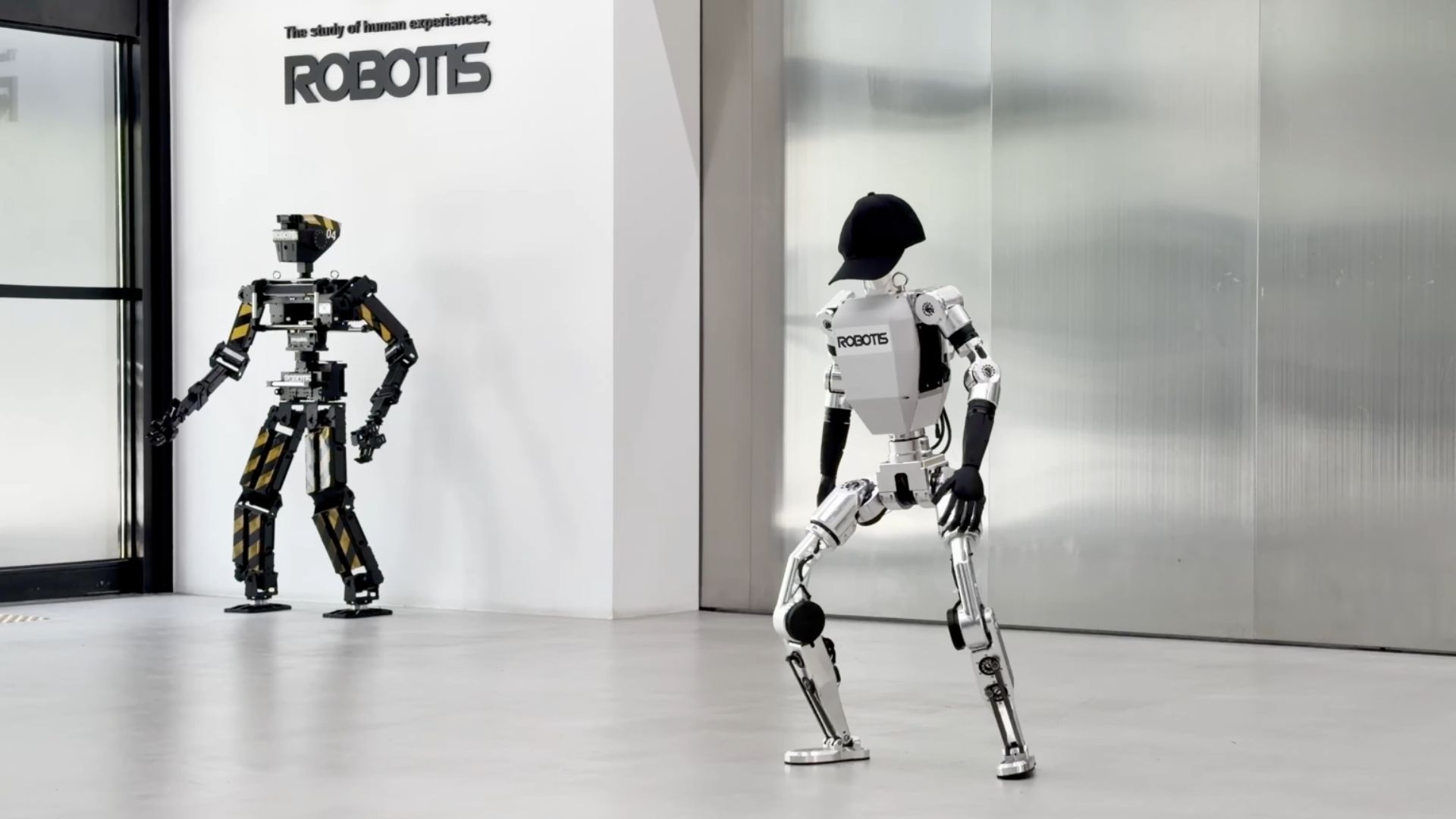
Reporting by Interesting Engineering describes a demonstration in which ROBOTIS used its open-source AI Sapiens platform to teach a humanoid robot a complex full-body routine, the CORTIS REDRED Challenge, using only smartphone video. Reporting by Interesting Engineering and blogger Mike Kalil says the pipeline combined video-based motion capture, motion retargeting, simulation-based reinforcement learning, and Sim2Real transfer to move policies from a digital twin to the physical robot. Mike Kalil reports the robot is 1.3 meters tall, weighs 34 kg, has 23 degrees of freedom, and runs on an 8-core ARM CPU with a Mali GPU and an NPU; he also notes ROBOTIS has not confirmed pricing or a release date. Industry practitioners should view this as another example of lowering the barrier to humanoid motion learning through cheaper capture and open-source toolchains.
What happened
Reporting by Interesting Engineering describes that ROBOTIS demonstrated its open-source AI Sapiens humanoid platform learning the CORTIS REDRED Challenge dance using only smartphone video rather than professional motion-capture systems. Reporting by Interesting Engineering and Mike Kalil says the demonstration combined video-based motion capture, motion retargeting, simulation-based reinforcement learning, and Sim2Real transfer to move learned behaviors from a simulated digital twin to a physical robot. Mike Kalil reports the robot measures 1.3 meters in height, weighs 34 kg, has 23 degrees of freedom, and runs onboard inference on an 8-core ARM CPU with a Mali GPU and a dedicated NPU; Kalil also notes ROBOTIS has not confirmed a release date or pricing, though Korean reports cited by Kalil place potential price below $10,000.
Technical details
Editorial analysis - technical context
The public descriptions place the pipeline stages that matter to practitioners into four parts: smartphone video capture; pose extraction and motion retargeting to a simulated humanoid; reinforcement learning in simulation to optimize balance and timing; and Sim2Real transfer for deployment on hardware. Reporting highlights the use of DYNAMIXEL-Q actuators in the physical robot, which are presented as part of the hardware stack supporting the transfer of learned policies to actuated joints.
Context and significance
What to watch
Editorial analysis
For robotics researchers and engineers, the two notable trends in this demonstration are the use of commodity capture (smartphone video) to generate training targets and the publication of an open-source physical-AI framework. Comparable public demonstrations increasingly emphasize lowering setup cost for imitation learning; that pattern accelerates experimentation because teams can iterate on motion datasets without access to studio-grade mocap. The reported hardware specs make AI Sapiens roughly comparable on paper to other recent lower-cost humanoids, though public reporting does not provide benchmarking data on stability, repeatability, or sample efficiency.
Observers should look for a public code or dataset release, technical documentation of the retargeting and RL reward design, and controlled evaluations comparing sim-to-real robustness to existing platforms. Pricing and availability statements from ROBOTIS would clarify whether this demonstration translates into a broadly accessible research platform. Additionally, independent tests measuring repeatability across runs and robustness to variations in phone-camera quality will be key indicators of practical utility.
Key Points
- 1Commodity smartphone video can act as a practical source for full-body motion data, lowering capture costs for humanoid imitation learning.
- 2Open-source physical-AI pipelines combining retargeting, RL in simulation, and Sim2Real make experimentation faster for robotics teams without mocap studios.
- 3Hardware like DYNAMIXEL-Q actuators and onboard NPUs remain critical to successful transfer, but independent benchmarks are needed to assess real-world robustness.
Scoring Rationale
A notable open-source humanoid robotics demo showing a smartphone-video-to-physical-motion pipeline (imitation learning, Sim2Real) - relevant to robotics ML practitioners. Sector-specific with limited independent verification, placing it at the top of the solid range.
Sources
Public references used for this report.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems