RealSense Enables Humanoids With 3D Navigation
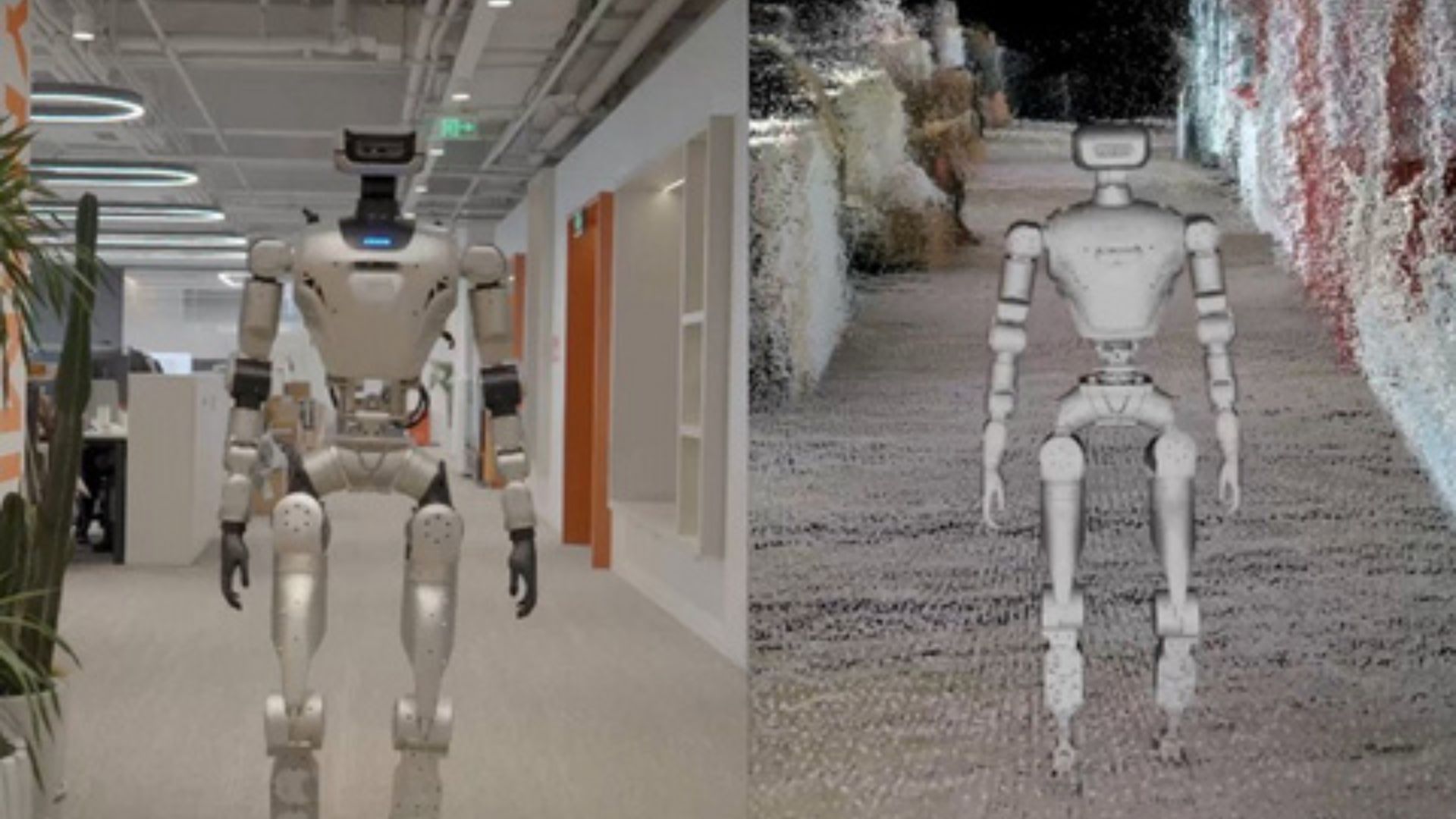
RealSense demonstrated an autonomous navigation system for humanoid robots with LimX Dynamics at NVIDIA GTC in California, showing integration of RealSense depth cameras, NVIDIA cuVSLAM, and Isaac Lab simulation. The system uses dense 3D perception and visual SLAM to enable mapping, localization, and safe motion, including stair climbing, curb detection, and uneven-terrain traversal. The demo highlights sim-to-real training to reduce development risk.
Key Points
- 1Demonstrates dense RealSense depth sensing integrated with NVIDIA cuVSLAM and Isaac Lab for humanoid navigation
- 2Addresses sim-to-real and 3D perception gaps enabling accurate mapping, localization, and collision avoidance
- 3Enables humanoids to climb stairs, traverse uneven terrain, detect curbs, and avoid moving obstacles
Scoring Rationale
Official NVIDIA-backed demo shows practical sim-to-real advances, but incremental novelty and limited technical detail constrain impact.
Sources
Public references used for this report.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems
