Humanoid Robot Masters Tennis With 96.5% Accuracy
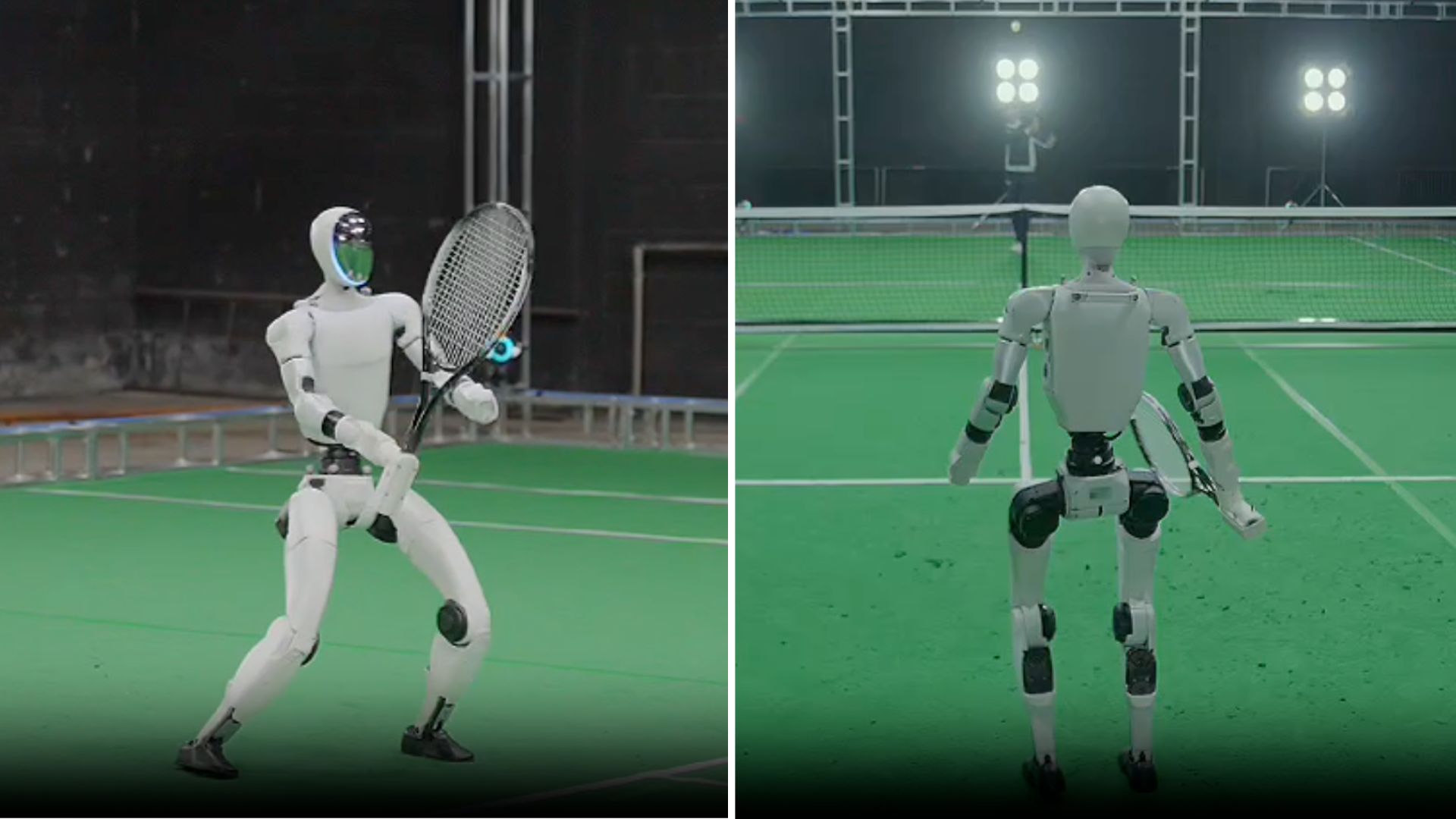
Researchers in China, working with Galbot, developed LATENT, a method that trains humanoid robots to play tennis using roughly five hours of amateur motion fragments. In deployment on a Unitree G1 robot and evaluated across 10,000 trials, the system achieved up to 96.5% successful returns and sustained multi-shot rallies with humans. The approach constructs a latent action space and uses reinforcement learning, though it currently relies on motion capture and simplified return tasks.
Key Points
- 1Trains robots using about five hours of amateur motion fragments and a learned latent action space
- 2Achieves 96.5% successful returns across 10,000 trials, outperforming prior methods on accuracy and naturalness
- 3Enables practitioners to refine, combine primitive moves and deploy RL-trained skills on humanoid platforms
Scoring Rationale
Strong real-world results and novel latent-action approach, limited by reliance on motion capture and simplified return-only evaluation.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems