Case Studyros 2edge impulseyolo proembedded inference
Autonomous Quadruped Robot Tracks And Pursues Ball
7.0
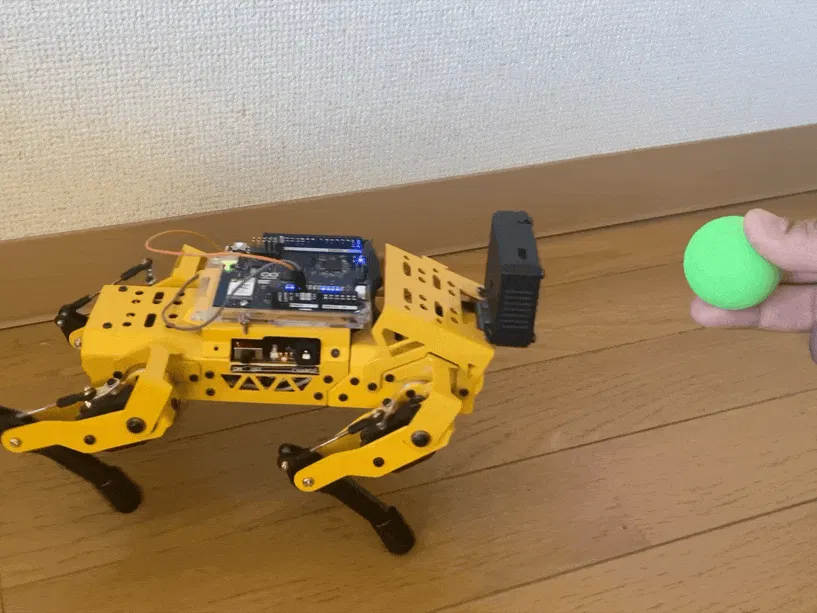
A project develops an autonomous legged robot that detects, tracks, and pursues a ball in real time using ROS 2, micro-ROS, and an Edge Impulse-trained model. The system uses a Hiwonder MechDog with an ESP32-S3 vision module and an Arduino Uno Q (Qualcomm Dragonwing QRB2210) for on-device inference; 182 labeled images trained a quantized YOLO‑Pro model achieving 99.2% precision and 100% test accuracy.
Key Points
- 1Implements real-time ball detection and pursuit using ROS 2, micro-ROS, and Edge Impulse
- 2Uses lightweight quantized YOLO‑Pro model (int8) achieving 99.2% precision, suitable for constrained hardware
- 3Enables on-device inference on Arduino Uno Q allowing untethered, low-latency perception for mobile robots
Scoring Rationale
Practical, reproducible robotics integration with on-device ML; limited novelty and single-project scope reduce broader impact.
Sources
Public references used for this report.
Practice interview problems based on real data
1,625 SQL & Python problems across 15 industry datasets — the exact type of data you work with.
Try 250 free problems